图说电机分类及应用!
读过中学物理的学霸学渣都知道,为了研究通电导体在磁场受力的那点事,我们把左手都练成了断掌,这也正是直流电机的原理。
所有电机都是由定子和转子组成,在直流电机中,为了让转子转起来,要一直改变
有刷电机又称直流电机或碳刷电机,常说的直流电机就是指有刷直流电机,它采用
换向,外部磁极不动内部线圈(电枢)动,换向器和转子线圈一起旋转,电刷和磁铁都不动,于是换向器和电刷摩擦摩擦,完成电流方向的切换。
外转子通常使用的是单相的,价格亲民,大批量生产已经接近碳刷电机,因此近年来得到普遍应用。
它具有高效率、低能耗、低噪音、超长寿命、高可靠性、可伺服控制、无级变频调速(可达很高转速)等优点,它相对比有刷直流电机体积小的多,控制比异步交流电机简单,启动转矩大过载能力强,至于缺点嘛……就是比有刷的贵、不好维护。
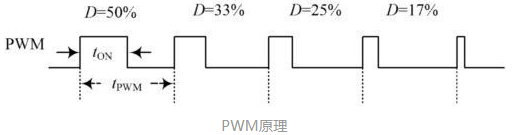
直流(有刷)电机通过调节电压、串接电阻、改变励磁都可以调速,但是实际以调节电压最为方便也最为常用,目前主要使用PWM调速,PWM实际上的意思就是通过高速的开关来实现直流的调压,一个周期内,开的时间长,平均电压就高,关的时间长,平均电压就低,调起来很方便,只要开关速度够快,电网的谐波就少,且电流更为连续。
但是电刷和换向器长期磨损,同时在换向的时候有巨大的电流变化,非常易产生火花,换向器和电刷限制了直流电动机的容量和速度,使得直流电动机的调速遇到了瓶颈。

对于无刷直流电机,调速的时候表面上只控制了输入电压,但电机的自控变频调速系统(无刷直流电机本身自带转子位置
获取装置,使用此装置的转子位置信号来控制变压变频调速装置的换相时刻)自动根据变压控制了频率,用起来和直流(有刷)电机几乎一样,非常方便。
由于转子采用永磁体,不需要专门的励磁绕组,在同等容量的情况下,电机体积更小,重量更轻,效率更加高,结构更紧凑,运行更可靠,动态性能更好,在电动汽车的驱动等方面都获得了广泛的应用。
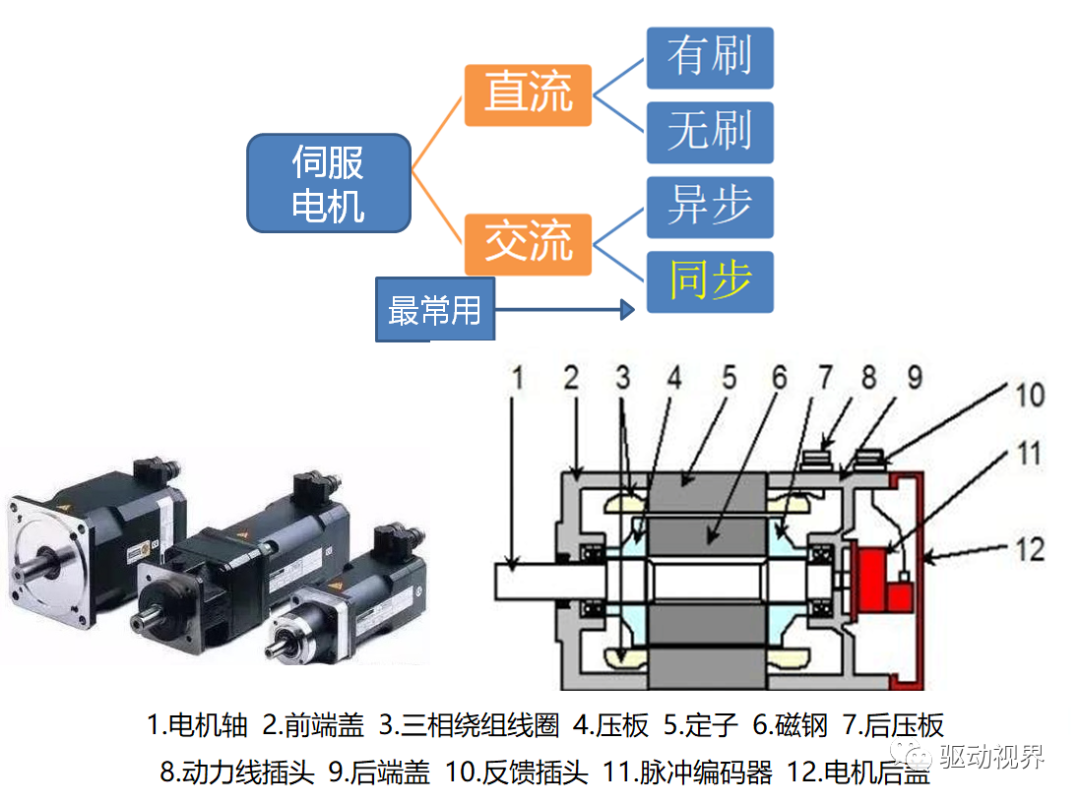
交流电机分为同步电机和异步电机,同步电机多用于发电机,异步电机多用于电动机。
电机的外壳是定子,定子上有三相对称交流绕组,由于三相电顺序变化,形成一个旋转的合成磁场,磁场的旋转速度就是同步转速。
同步转速n=60f/p,f是频率,p是极对数,比如对于接入国家电网50Hz的2极电动机(即极对数为1对),那么转速n=60*50/1=3000r/min。
转子线圈将切割旋转磁场,产生感应电动势,进而产生感应电流,最后产生旋转磁场,这样转子就变成了一个
,将跟随定子磁场旋转,所以转子的转速必然<定子的旋转磁场,这样才可以切割磁感线。
即转子的异步转速<同步转速,转子与定子磁场存在转速差,所以称之为异步电机。
不同厂家生产的异步电机额定转速略有差异,2极电机约2800+r/min,4极,6极,8极异步约为1400+,950+,700+。


如果让转子速度=定子磁场旋转速度,就成为了同步电机,此时就需要把定子变成一个电磁铁或永磁铁,即给定子通电,此时不需要再切割磁感线就能旋转,旋转速度与磁场旋转速度相同,即形成同步电机。
同步电机转子结构比异步电机复杂,价格高,在生产生活中应用不如异步电机广泛,主要用作发电机上,现在火电站,水电站、汽轮机、水轮机基本都是同步电机。

、电机的磁极分布都可以调速,但是实际上实现无极调速用调节频率和电压的方法实现。
变频调速的全称是变压变频调速(VVVF),也就是在改变频率的时候改变电压,这样异步电动机的调速范围就足够大了。
器件变换为另一个频率的交流电,最高输出频率不能超过输入频率的一半,所以一般只用在低转速、大容量的系统中,可以省去庞大的齿轮减速箱。
变成可控频率和电压的交流,配合PWM技术,这种变频器能轻松实现大范围的变压变频。
对于电动汽车来讲,异步电动机皮实耐用,过载能力强,控制算法又如此成熟,可完全拿来用。

同步电机的调速:同步机没有转差率,在结构确定的情况下,控制电压不能改变转速,所以在变频器出现之前,同步电动机是完全不能调速的。
变频器的出现让交流同步电动机也有了巨大的调速范围,因其转子也有独立励磁(永磁体或者电励磁),其调速范围要比异步电动机更宽,同步电动机焕发了新的生机。
对于他控变频调速,和异步电动机的变频调速类似,也能够准确的通过其数学模型采用SVPWM等控制方式来实现控制,其性能还要优于普通交流异步电动机。
自控变频同步电动机在发展过程中曾经有多种名字,比如无换向器电机;当采用永磁体且输入三相正弦波时,可以称为正弦波永磁同步电动机;而如果输入方波,那么就可以称为梯形波永磁同步电动机,没错,这就是类似于之前说的的无刷直流机(BLDM),大家是不是感觉饶了个大圈有转回去了,但是你现在对于变频变速的理解一定更深一步了,所以无刷直流电机时采用直流输入,但是使用了同步电机的变频技术(结构与永磁同步电机相同),在Model3上就采用了直流无刷电机。

单相串励电动机的优点是由于它转速高、起动力矩大、体积小、重量轻、不容易堵转、适用电压范围很广,可以用调压的方法来调速,简单且易于实现。
单相串励电机的结构同直流串励电机十分相似,主要的不同之处在于单相串励电机的定子铁心必须由硅钢片叠压而成,而直流的磁极既可以由叠压而成,又能做成整体结构。
采用调节电压方法,采用可控硅调速技术,具有线路简单,元件体积小等特点,是一种可控硅简单有效的方法。
单相电流通过电枢绕组时产生的是脉振磁场而不是旋转磁场,所以单相异步电动机不能自起动。
主绕组由单相电源直接供电;副绕组在空间上与主绕组差90°(电角度,等于机械角度被电动机磁极对数除)。
或电阻后再接到单相交流电源,使其中通过的电流和主绕组中的电流有一定的相位差。
利用电阻分相方法的电动机价格低,例如副绕组用较细的导线绕制即可,但分相效果较差,且电阻上要消耗能量。
这种电动机在起动并达到一定转速后,通常由装在电动机轴上的离心式开关将副绕组自动切除,以减少电阻上的损耗、提高运行效率。
一般用于起动转矩要求不高的场合,如小型车床、小型电冰箱等,缺点是不能调速速。
利用电容分相,效果较好,有可能是在电动机某一工作点时,使电机合成磁场接近于圆形旋转磁场,从而获得较好的工作特性。
为使分相异步电动机获得较好的起动性能或较好的运行特性或两者兼有,其所需的电容(量值)是不同的,可分为三种
(开环)步进电机是将电脉冲信号转变为角位移的开环控制电机,应用极为广泛。
在非超载的情况下,电机的转速和停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当
可以经过控制脉冲个数来控制角位移量,进而达到准确定位的目的;同时能通过控制脉冲频率来控制电机转动的速度和加速度,进而达到调速的目的。
步进电机虽然由直流电流供电,但是不能理解为直流电机,直流电机是将直流电能转换为机械能的动力电机,而步进电机是将电脉冲信号转变为角位移的开环控制电机。
注意步进电机应用于低速场合--每分钟转速不超过1000r/min,最佳工作区间是150~500r/min,(闭环步进可达1500)。
2相步进电机在60~70r/min有可能会出现低速共振现象,产生振动和噪音,一定要通过改变减速比、增加细分数、添加磁性阻尼器等方式避免。
细分精度需要注意的几点,当细分等级大于4后,步距角的精度不能够确保,精度要求高,最好换用相数更多(即步距角更小)的步进电机或闭环步进、伺服电机。
C矩频特性——步进电机随转速提高力矩变小,所以其最高工作转速一般在<1000r/min,伺服电机在额定转速内(一般3000r/min)内都能输出额定力矩,在额定转速以上为恒功率输出,最高转速可达5000 r/min;
F速度响应——步进电机启动时间0.15~0.5s,伺服电机0.05~0.1,最快可0.01s达到 额定3000r/min;
实际使用中会发现:伺服电机贵,贵出很多,所以同步电机应用更广泛,尤其是在定位精度要求不是很高的同步带传动、平带输送机等场合常常使用步进电机。


闭环步进电机:除了开环步进电机,还有在电机尾部添加了编码器,能轻松实现闭环控制的步进电机。
步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。
1.高速响应,相对于服电机,闭环步进对定位指令有很强的跟随性,因此定位时间很短。在频繁启停的应用中,可显著缩短定位时间。
3.在100%负载情况下也可可产生高扭矩,无失步运行,无需像普通步进系统一样考虑扭矩损失等问题。
4.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。
伺服电机(servo motor)也叫执行电机,可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度。
电机每旋转一个角度,编码器都会发出对应数量的反馈脉冲,反馈脉冲和伺服驱动器接收的脉冲形成闭环控制,这样伺服驱动器就能够很精确的控制电机的转动,以此来实现精确的定位。

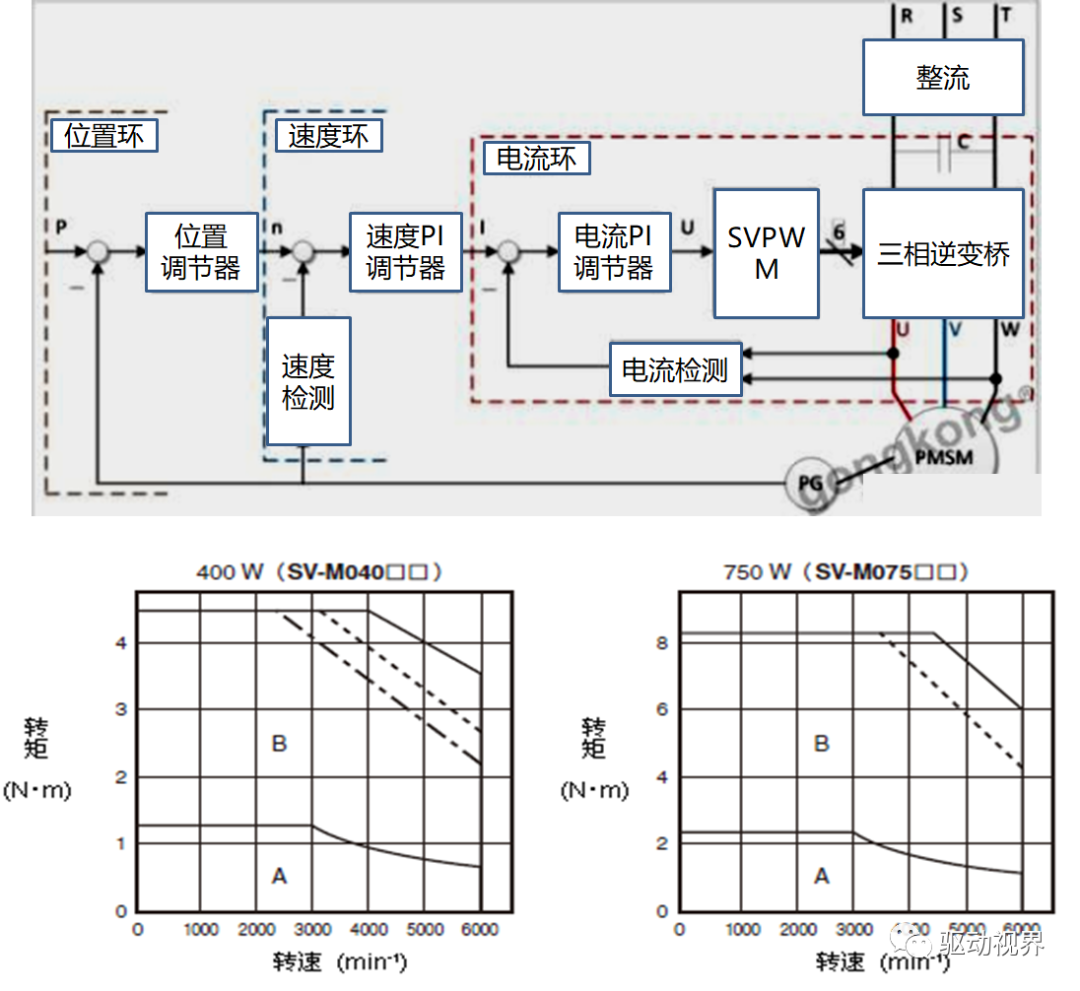
用的伺服电机都是三环控制,即电流环、速度环、位置环,分别能反馈电机运行的角加速度、角速度和旋转位置。
通过三者的反馈控制电机各相的驱动电流,实现电机的速度和位置都准确按照预定运行。
交流伺服具备额定转速下力矩恒定的特点,常见200W,400W低中惯量交流伺服额定转速为3000rpm,最高转速5000rpm,转速高。
同体积下电机惯量转子惯量小,400W伺服惯量仅相当于57基座2NM步进电机的转子惯量。
步进和伺服电机的原始扭矩不够用的情况下,往往需要配合减速机进行工作,能够正常的使用减速齿轮组或行星减速器。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉线圈线圈+关注
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
的缺点也同样直接,例如需要脉冲信号输出电路;当控制不适当的时候,有极大几率会出现同步丢失现象;由于在旋转轴停止后任旧存在电流而产生热量。步进
由于电能易于转换、传输、分配和控制,现代能源的主要形式是电能,所以,与电能密切关联的
如何使用TinyVision去手动构建Linux 6.1+Debian 12镜像呢?
由于 Windows 无法加载这个设备所需的驱动程序,导致这个设备工作异常?
- 上一篇: 各种电机原理动态图盘点
- 下一篇: 2018年度国际最佳发动机
推荐文章
- 我国速度!提早64天白鹤滩又一台国际最大水轮发电机组转子“就位” 2023-12-08
- 国内最大轴流通桨式水轮发电机组进入72小时试运行! 2023-12-08
- 水轮发电机组 2023-12-08
- 世界首台85万千瓦水轮发电机转子成功吊装 2023-12-10
- 我国8台国际最大水轮发电机组悉数投产发电 - 水轮机 2023-12-10
- 华能水电请求水轮发电机定子电磁振荡核算办法和体系专利定子电磁振荡可显着下降 2023-12-11
- 水轮发电机-Alstom法国制作业皇冠上的宝石 2023-12-11
- 长江电力新获得实用新型专利授权:“一种水轮发电机定子线棒冷却平台” 2023-12-12
- 长江电力获得水轮发电机转子吊装主动插板组织对正监测专利可监测转子下放进程并及时预警 2023-12-12
- 超级巨无霸单机容量全球最大水轮发电机组年发电近2000亿度 2023-12-14