步进电机的机械原理
):转子由软磁资料制造成,结构相比照较简单、本钱低、动态力学性能差、步距角能够很小;
1.2、永磁式步进电机(PM):转子由永磁资料制成,转子级数少,步距角大,力矩大,动态性能好;
1.3、混合式步进电机(HB):结合VR、PM电机长处,输出力矩大、步距角小、动态性能好,现在运用最为广泛,下述以该类电机为例进行介绍。
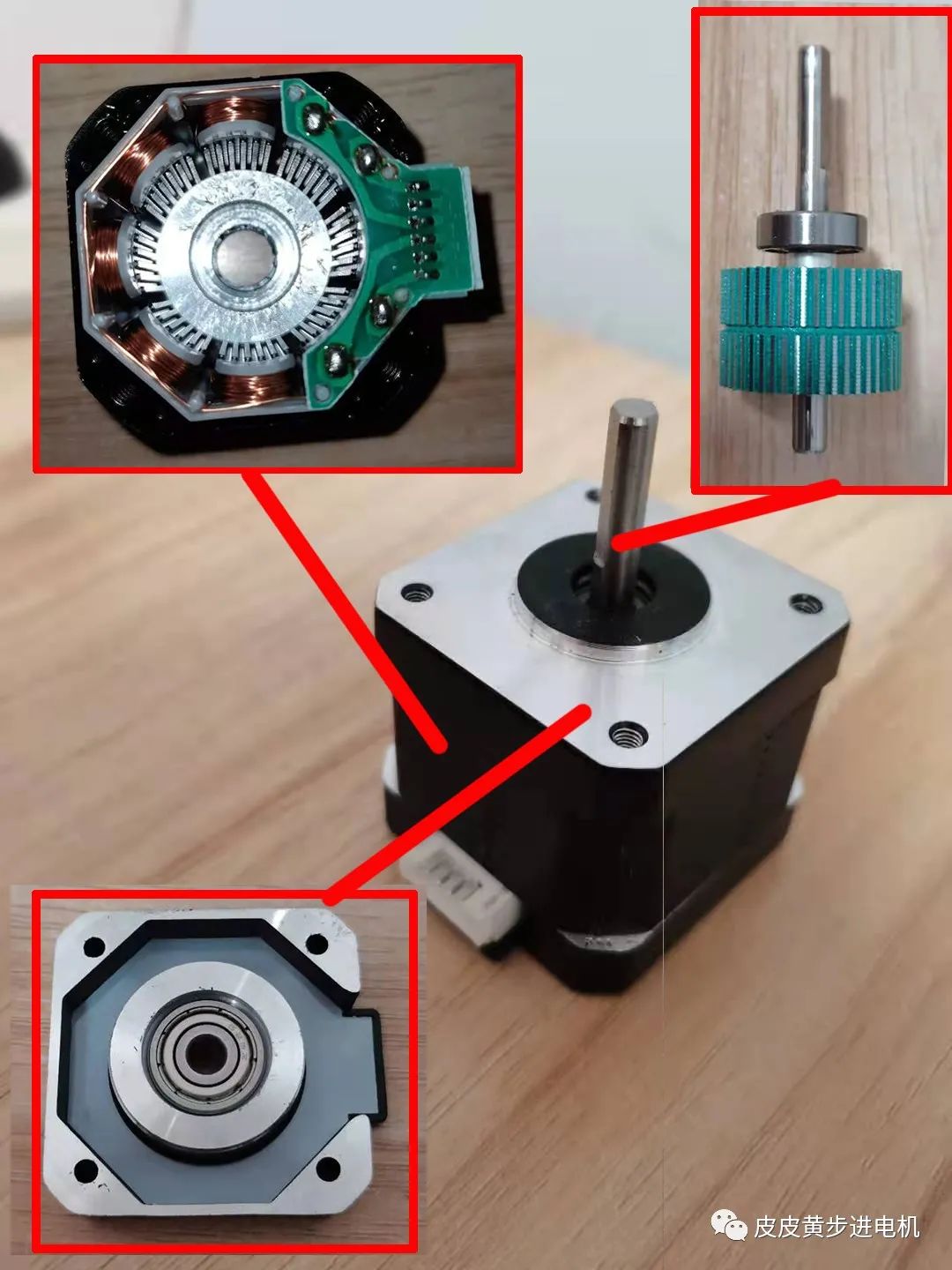
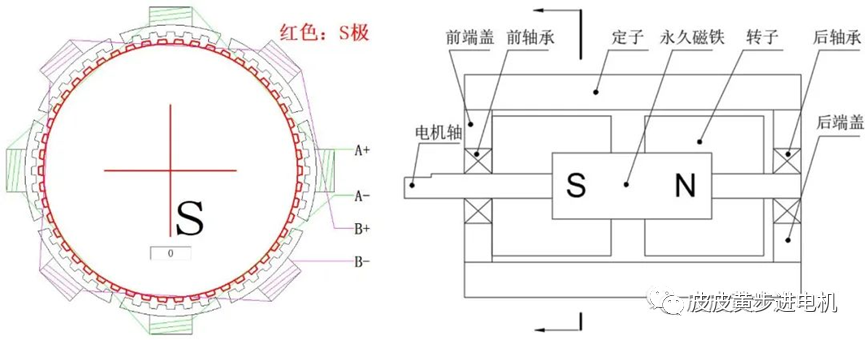
定子有8个磁极,如下图所示,绿色绕线的为A相,洋红色绕线个齿,均匀分布。定子每个磁极有6个齿,总计8*6=48齿。当A相定子有一对磁极齿与转子齿彻底对齐时,A相定子另一对磁极齿必定与转子齿彻底错开,此刻B相定子齿与转子齿呈半齿对齐(或许半齿错开)。同理能判别B相定子齿与转子齿对齐时的状况。
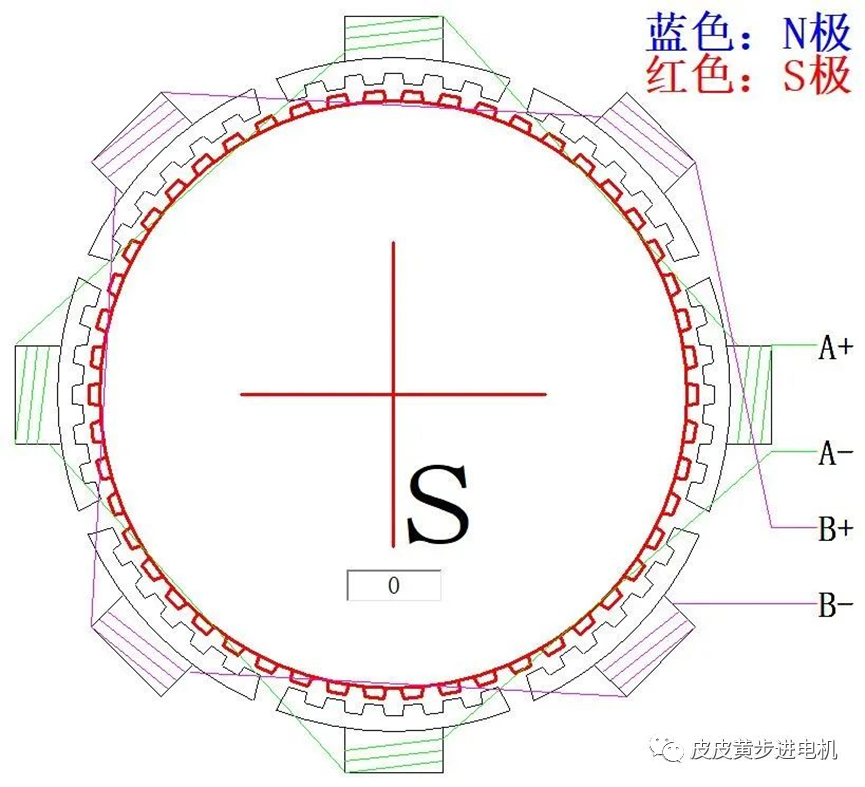
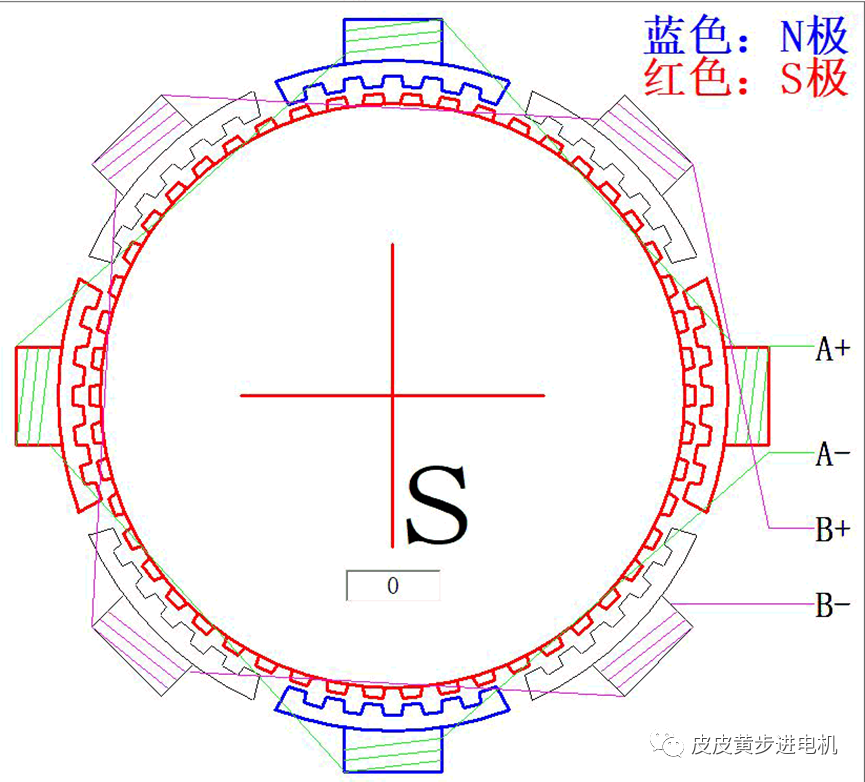
①当A+接电源正极,A-接电源负极时,A相线圈导通,发生磁场,如图下图所示,A相蓝色的N极与转子的S极彼此招引对齐,一起A相的S极与转子S极彼此排挤而错开,此刻到达安稳状况
⑤然后回到①图状况,通过4个过程,转子转过一个齿,转子每一个齿对应的视点是360/50=7.2°,所以每一个过程,电机转过的视点便是7.2°/4=1.8°,即步进电机的步距角
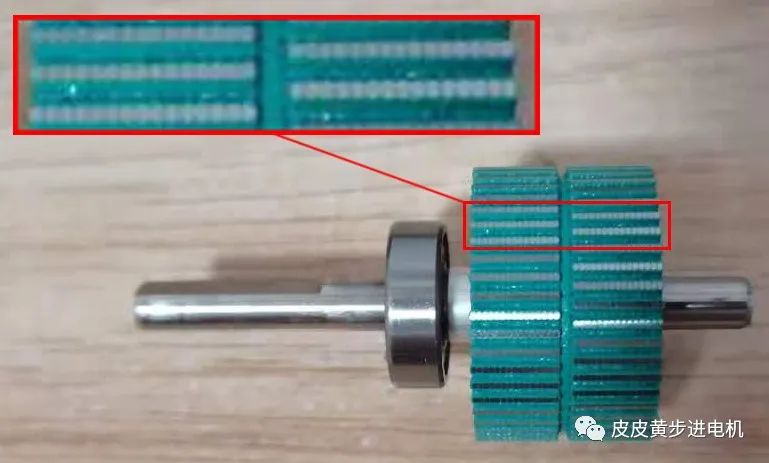
上述解说的是转子S受力,转子N极齿与S极齿是彻底错开的,如下图所示,受力剖析与S极是相同的。
为了便利直观的了解电机滚动原理,制作了电机演示器,能够手动操作,也能够主动操作,具有4拍和8拍形式,速度也可自行调理

控制系统的设计方案 /
手,现在理论算法写好了,便是不知道怎样进行试验试验,我的疑问如下: 因
体积巨细。体积减小最终相应的能源消耗也小了,工作本钱也大大的减低了,高效率
带着不同的轴工作,最终就导致XY采样精度的要求也大大的进步,这样就能确保在预订的吸管井能很好的运用,
外文名为Stepping motor,是一种将电脉冲信号转化为相应角位移或线位移的电动机,也是感应
【国产FPGA+OMAPL138开发板体会】(原创)5.FPGA的AI加快源代码
【米尔-全志T113-i开发板试用】JPG硬件编码的完成、YUV转化neon加快和比照测验
【先楫HPM5361EVK开发板试用体会】(原创)6.手把手实战红外线传感器源代码
- 上一篇: 传感器技术
- 下一篇: 从钻木取火到野外电源人们对动力运用的改动
推荐文章
- 我国速度!提早64天白鹤滩又一台国际最大水轮发电机组转子“就位” 2023-12-08
- 国内最大轴流通桨式水轮发电机组进入72小时试运行! 2023-12-08
- 水轮发电机组 2023-12-08
- 世界首台85万千瓦水轮发电机转子成功吊装 2023-12-10
- 我国8台国际最大水轮发电机组悉数投产发电 - 水轮机 2023-12-10
- 华能水电请求水轮发电机定子电磁振荡核算办法和体系专利定子电磁振荡可显着下降 2023-12-11
- 水轮发电机-Alstom法国制作业皇冠上的宝石 2023-12-11
- 长江电力新获得实用新型专利授权:“一种水轮发电机定子线棒冷却平台” 2023-12-12
- 长江电力获得水轮发电机转子吊装主动插板组织对正监测专利可监测转子下放进程并及时预警 2023-12-12
- 超级巨无霸单机容量全球最大水轮发电机组年发电近2000亿度 2023-12-14